Điều chế là một quá trình điện phi tuyến tính, trong đó các thông số của một tín hiệu (sóng mang) được thay đổi bằng cách sử dụng một tín hiệu khác (điều chế, thông tin). Trong công nghệ thông tin liên lạc, điều chế tần số, biên độ và pha được sử dụng rộng rãi. Trong công nghệ điện tử công suất và vi xử lý, điều chế độ rộng xung đã trở nên phổ biến.
Nội dung
PWM (Điều chế độ rộng xung) là gì
Với điều chế độ rộng xung của tín hiệu gốc, biên độ, tần số và pha của tín hiệu gốc không thay đổi. Khoảng thời gian (chiều rộng) của xung hình chữ nhật có thể thay đổi dưới tác động của tín hiệu thông tin. Trong tài liệu kỹ thuật tiếng Anh, nó được viết tắt là PWM - điều chế độ rộng xung.
Cách PWM hoạt động
Tín hiệu điều chế độ rộng xung được hình thành theo hai cách:
- tương tự;
- kỹ thuật số.
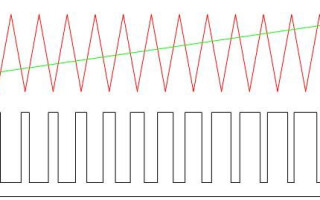
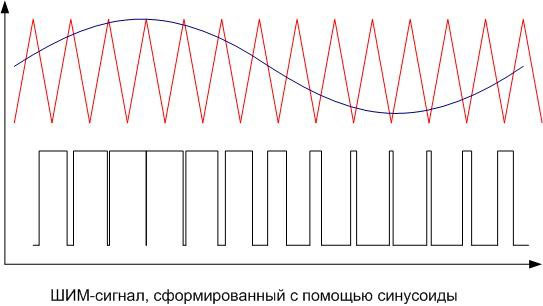
Với phương pháp tương tự để tạo ra tín hiệu PWM, sóng mang ở dạng tín hiệu răng cưa hoặc hình tam giác được đưa đến một bộ đảo đầu vào so sánhvà thông tin - về không đảo ngược. Nếu mức sóng mang tức thời cao hơn tín hiệu điều chế, thì đầu ra của bộ so sánh bằng 0, nếu thấp hơn - một. Đầu ra là một tín hiệu rời rạc có tần số tương ứng với tần số của tam giác sóng mang hoặc cưa và độ dài xung tỷ lệ với mức của điện áp điều biến.
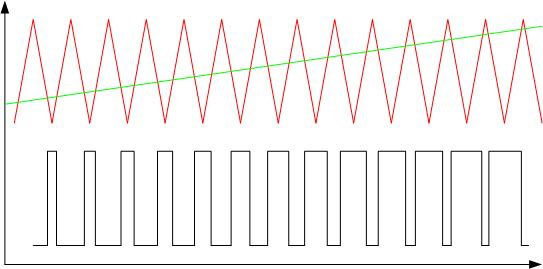
Ví dụ, điều chế độ rộng xung của tín hiệu tam giác đang tăng tuyến tính. Khoảng thời gian của các xung đầu ra tỷ lệ với mức của tín hiệu đầu ra.
Bộ điều khiển PWM tương tự cũng có sẵn ở dạng vi mạch làm sẵn, bên trong có lắp đặt bộ so sánh và mạch tạo sóng mang. Có các đầu vào để kết nối các phần tử cài đặt tần số bên ngoài và cung cấp tín hiệu thông tin. Một tín hiệu bị xóa khỏi đầu ra điều khiển các phím ngoại mạnh mẽ. Ngoài ra còn có các đầu vào cho phản hồi - chúng cần thiết để duy trì các thông số điều khiển đã đặt. Chẳng hạn như chip TL494. Đối với những trường hợp quyền lực của người tiêu dùng tương đối nhỏ, có thể sử dụng bộ điều khiển PWM với các phím tích hợp. Chìa khóa bên trong của vi mạch LM2596 được thiết kế cho dòng điện lên đến 3 ampe.
Phương pháp kỹ thuật số được thực hiện bằng cách sử dụng vi mạch hoặc vi xử lý chuyên dụng. Độ dài xung được điều khiển bởi chương trình bên trong. Nhiều bộ vi điều khiển, bao gồm cả PIC và AVR phổ biến, có một mô-đun tích hợp để triển khai phần cứng PWM “trên bo mạch”, để nhận được tín hiệu PWM, bạn cần phải kích hoạt mô-đun và thiết lập các thông số hoạt động của nó.Nếu không có mô-đun như vậy, thì PWM có thể được tổ chức hoàn toàn bằng phần mềm, điều này không khó. Phương pháp này mang lại nhiều quyền lực và tự do hơn thông qua việc sử dụng linh hoạt các đầu ra, nhưng sử dụng nhiều tài nguyên bộ điều khiển hơn.
Đặc điểm của tín hiệu PWM
Các đặc điểm quan trọng của tín hiệu PWM là:
- biên độ (U);
- tần số (f);
- chu kỳ nhiệm vụ (S) hoặc chu kỳ nhiệm vụ D.
Biên độ tính bằng vôn được đặt tùy thuộc vào tải. Nó phải cung cấp điện áp cung cấp danh định của người tiêu dùng.
Tần số của tín hiệu được điều chế theo độ rộng xung được chọn từ các cân nhắc sau:
- Tần số càng cao thì độ chính xác điều khiển càng cao.
- Tần số không được thấp hơn thời gian phản hồi của thiết bị được điều khiển bởi PWM, nếu không sẽ xảy ra các gợn sóng đáng chú ý của thông số được điều khiển.
- Tần số càng cao, tổn thất chuyển mạch càng cao. Nó phát sinh từ thực tế là thời gian chuyển đổi của khóa là hữu hạn. Ở trạng thái khóa, tất cả điện áp cung cấp đều giảm trên phần tử chính, nhưng hầu như không có dòng điện. Ở trạng thái mở, dòng điện đầy tải chạy qua khóa, nhưng điện áp giảm nhỏ, vì điện trở thông lượng là một vài ohms. Trong cả hai trường hợp, công suất tiêu tán là không đáng kể. Quá trình chuyển đổi từ trạng thái này sang trạng thái khác diễn ra nhanh chóng, nhưng không ngay lập tức. Trong quá trình mở khóa, một điện áp lớn giảm xuống một phần tử mở một phần và đồng thời có một dòng điện đáng kể chạy qua nó. Lúc này công suất tiêu tán đạt giá trị cao. Khoảng thời gian này ngắn, phím không có thời gian nóng lên đáng kể.Nhưng với sự gia tăng tần suất của các khoảng thời gian như vậy trên một đơn vị thời gian, nó sẽ trở nên nhiều hơn và tổn thất nhiệt tăng lên. Do đó, để xây dựng các khóa, điều quan trọng là phải sử dụng các yếu tố nhanh.
- Khi lái xe động cơ điện tần số phải được loại bỏ khỏi khu vực mà một người có thể nghe thấy - 25 kHz trở lên. Bởi vì ở tần số PWM thấp hơn, tiếng còi khó chịu xảy ra.
Các yêu cầu này thường mâu thuẫn với nhau, vì vậy việc lựa chọn tần suất trong một số trường hợp là một sự thỏa hiệp.
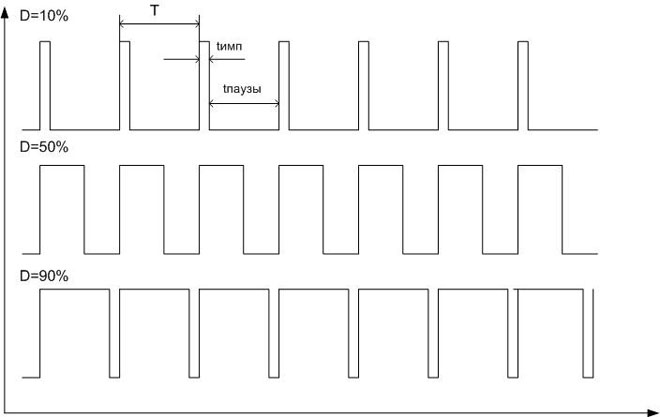
Giá trị điều chế đặc trưng cho chu kỳ nhiệm vụ. Vì tốc độ lặp lại xung là không đổi nên khoảng thời gian của chu kỳ cũng không đổi (T = 1 / f). Khoảng thời gian bao gồm một xung động và một khoảng thời gian tạm dừng, có khoảng thời gian tương ứng là timp và ttạm dừng, và timp+ ttạm dừng= T. Chu kỳ làm việc là tỷ số giữa thời lượng xung với khoảng thời gian - S \ u003d timp/ T. Nhưng trên thực tế, việc sử dụng giá trị nghịch đảo thuận tiện hơn - hệ số lấp đầy: D = 1 / S = T / timp. Nó thậm chí còn thuận tiện hơn khi thể hiện hệ số lấp đầy dưới dạng phần trăm.
Sự khác biệt giữa PWM và SIR là gì
Trong các tài liệu kỹ thuật nước ngoài không có sự khác biệt giữa điều chế độ rộng xung và điều chỉnh độ rộng xung (PWR). Các chuyên gia Nga đang cố gắng phân biệt giữa các khái niệm này. Trên thực tế, PWM là một loại điều chế, tức là những thay đổi trong tín hiệu sóng mang dưới ảnh hưởng của một tín hiệu khác, điều chế một tín hiệu. Tín hiệu sóng mang hoạt động như một vật mang thông tin và tín hiệu điều chế thiết lập thông tin này. Và điều chỉnh độ rộng xung là điều chỉnh chế độ tải sử dụng PWM.
Lý do và ứng dụng của PWM
Nguyên tắc điều chế độ rộng xung được sử dụng trong bộ điều khiển tốc độ của động cơ không đồng bộ mạnh mẽ. Trong trường hợp này, tín hiệu điều tần có thể điều chỉnh được (một pha hoặc ba pha) được tạo ra bởi bộ tạo sóng sin công suất thấp và được đặt chồng lên sóng mang theo cách tương tự. Đầu ra là tín hiệu PWM, được cấp cho các phím có công suất cần thiết. Sau đó, bạn có thể chuyển chuỗi xung kết quả qua một bộ lọc thông thấp, ví dụ, thông qua một mạch RC đơn giản và chọn hình sin ban đầu. Hoặc bạn có thể làm mà không cần nó - quá trình lọc sẽ diễn ra tự nhiên do quán tính của động cơ. Rõ ràng, tần số sóng mang càng cao thì dạng sóng đầu ra càng gần với hình sin ban đầu.
Một câu hỏi tự nhiên được đặt ra - tại sao không thể khuếch đại tín hiệu của máy phát điện ngay lập tức, ví dụ: sử dụng bóng bán dẫn mạnh mẽ? Vì một phần tử điều hòa hoạt động theo chế độ tuyến tính sẽ phân phối lại công suất giữa phụ tải và khóa. Trong trường hợp này, công suất đáng kể bị lãng phí cho phần tử chính. Nếu phần tử điều khiển mạnh mẽ hoạt động ở chế độ chính (bóng bán dẫn trinistor, triac, RGBT), thì công suất được phân phối theo thời gian. Tổn thất sẽ thấp hơn nhiều và hiệu quả sẽ cao hơn nhiều.
Trong công nghệ kỹ thuật số, không có giải pháp thay thế cụ thể nào cho việc điều chỉnh độ rộng xung. Ở đó, biên độ tín hiệu không đổi, điện áp và dòng điện chỉ có thể thay đổi bằng cách điều chế sóng mang dọc theo độ rộng xung và sau đó lấy trung bình của nó. Do đó, PWM được sử dụng để điều chỉnh điện áp và dòng điện trên những đối tượng có thể trung bình tín hiệu xung. Tính trung bình xảy ra theo những cách khác nhau:
- do quán tính của tải.Do đó, quán tính nhiệt của lò sưởi nhiệt điện và đèn sợi đốt cho phép các đối tượng được điều chỉnh không hạ nhiệt đáng kể trong khoảng thời gian tạm dừng giữa các xung.
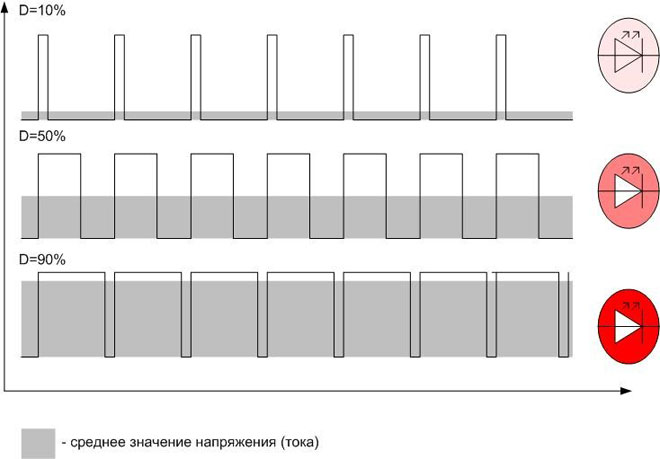
- Do quán tính của tri giác. Đèn LED có thời gian tắt từ xung này sang xung khác, nhưng mắt người không nhận thấy điều này và coi nó như một ánh sáng liên tục với cường độ thay đổi. Nguyên tắc này được sử dụng để điều khiển độ sáng của các chấm của màn hình LED. Nhưng hiện tượng chớp mắt không thể nhận thấy với tần số vài trăm hertz vẫn xuất hiện và gây mỏi mắt.
- do quán tính cơ học. Thuộc tính này được sử dụng trong điều khiển động cơ DC có chổi than. Với tần số điều chỉnh được lựa chọn chính xác, động cơ không có thời gian để giảm tốc độ trong những khoảng dừng chết.
Do đó, PWM được sử dụng khi giá trị trung bình của điện áp hoặc dòng điện đóng vai trò quyết định. Ngoài các trường hợp phổ biến đã đề cập, phương pháp PWM điều chỉnh dòng điện trung bình trong máy hàn và bộ sạc pin, v.v.
Nếu không thể lấy trung bình tự nhiên, trong nhiều trường hợp, vai trò này có thể được bộ lọc thông thấp đã đề cập (LPF) dưới dạng một chuỗi RC. Đối với mục đích thực tế, điều này là đủ, nhưng cần phải hiểu rằng không thể tách tín hiệu gốc khỏi PWM bằng cách sử dụng bộ lọc thông thấp mà không bị méo. Rốt cuộc, phổ PWM chứa vô số sóng hài chắc chắn sẽ rơi vào băng tần của bộ lọc. Vì vậy, không nên xây dựng ảo tưởng về hình dạng của hình sin tái tạo.
Điều khiển LED PWM RGB rất hiệu quả và hiệu quả. Thiết bị này có ba điểm nối p-n - đỏ, xanh dương, xanh lá cây.Bằng cách thay đổi riêng biệt độ sáng của ánh sáng của từng kênh, bạn có thể nhận được hầu hết mọi màu sắc của ánh sáng LED (ngoại trừ màu trắng tinh khiết). Khả năng tạo hiệu ứng ánh sáng với PWM là vô tận.
Ứng dụng phổ biến nhất của tín hiệu kỹ thuật số được điều chế độ rộng xung là điều khiển dòng điện hoặc điện áp trung bình chạy qua tải. Nhưng việc sử dụng loại điều chế này không theo tiêu chuẩn cũng có thể xảy ra. Tất cả phụ thuộc vào trí tưởng tượng của nhà phát triển.
Các bài tương tự: