Khoa học trong lĩnh vực điện trong thế kỷ 19 và 20 phát triển nhanh chóng dẫn đến sự ra đời của động cơ điện cảm ứng. Với sự trợ giúp của các thiết bị đó, sự phát triển của nền công nghiệp đã có những bước tiến xa và hiện nay không thể hình dung các nhà máy, xí nghiệp lại không có máy điện sử dụng động cơ điện không đồng bộ.
Nội dung
Lịch sử xuất hiện
Lịch sử hình thành động cơ điện không đồng bộ bắt đầu từ năm 1888, khi Nikola Tesla được cấp bằng sáng chế cho mạch động cơ điện, cùng năm đó một nhà khoa học khác trong lĩnh vực kỹ thuật điện Gallileo Ferraris đã xuất bản một bài báo về các khía cạnh lý thuyết của hoạt động của máy điện không đồng bộ.
Năm 1889, nhà vật lý người Nga Mikhail Osipovich Dolivo-Dobrovolsky đã nhận được bằng sáng chế tại Đức cho động cơ điện ba pha không đồng bộ.

Tất cả những phát minh này đã giúp cải tiến máy điện và dẫn đến việc sử dụng rộng rãi máy điện trong công nghiệp, giúp tăng tốc đáng kể tất cả các quy trình công nghệ trong sản xuất, tăng hiệu quả công việc và giảm cường độ lao động.
Hiện tại, động cơ điện phổ biến nhất được sử dụng trong công nghiệp là nguyên mẫu của máy điện do Dolivo-Dobrovolsky tạo ra.
Thiết bị và nguyên lý hoạt động của động cơ không đồng bộ
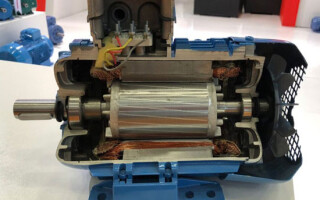
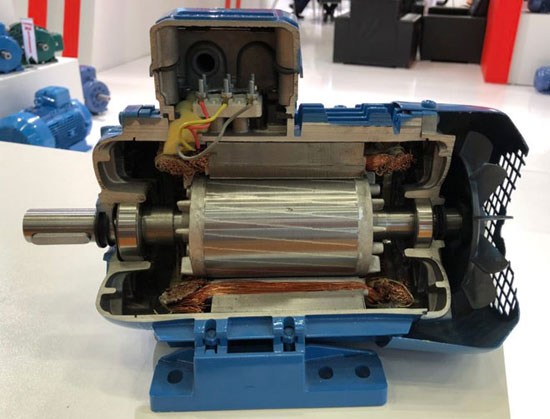
Các thành phần chính của động cơ cảm ứng là stato và rôto, chúng được ngăn cách với nhau bằng một khe hở không khí. Công việc tích cực trong động cơ được thực hiện bởi các cuộn dây và lõi của rôto.
Sự không đồng bộ của động cơ được hiểu là sự chênh lệch giữa tốc độ rôto và tần số quay của điện từ trường.
stato - đây là bộ phận cố định của động cơ, lõi được làm bằng thép dẫn điện và được lắp vào khung. Giường được làm theo cách đúc từ vật liệu không nhiễm từ (gang, nhôm). Các cuộn dây stato là một hệ thống ba pha, trong đó các dây dẫn được đặt trong các rãnh với góc lệch 120 độ. Các pha của cuộn dây được kết nối tiêu chuẩn với mạng theo sơ đồ "hình sao" hoặc "hình tam giác".

Rotor Nó là bộ phận chuyển động của động cơ. Rôto của động cơ điện không đồng bộ gồm hai loại: rôto lồng sóc và rôto pha. Các loại này khác nhau về thiết kế của dây quấn rôto.
Động cơ không đồng bộ lồng sóc
Loại máy điện này lần đầu tiên được cấp bằng sáng chế bởi M.O. Dolivo-Dobrovolsky và được gọi phổ biến là "bánh xe sóc" do sự xuất hiện của cấu trúc. Dây quấn rôto ngắn mạch gồm các thanh đồng được nối ngắn mạch với các vòng (nhôm, đồng thau) và được đưa vào các rãnh của cuộn dây của lõi rôto. Loại rôto này không có các tiếp điểm chuyển động, vì vậy các động cơ này hoạt động rất đáng tin cậy và bền bỉ.
Động cơ cảm ứng với rôto pha
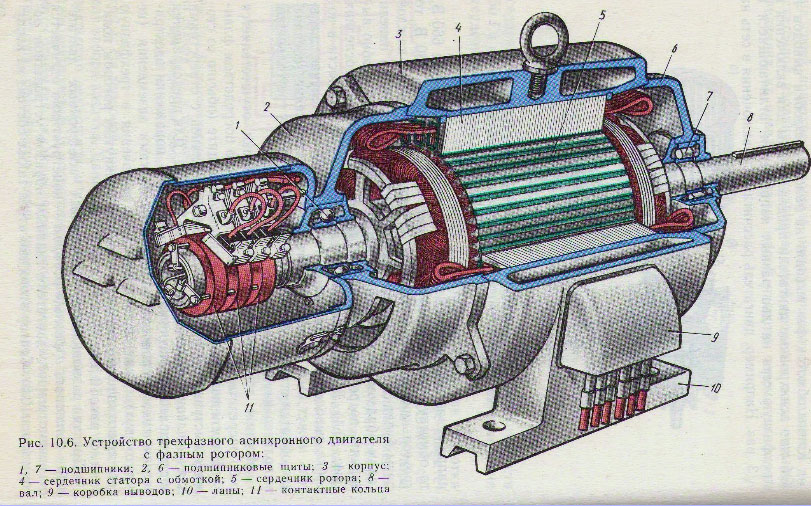
Một thiết bị như vậy cho phép bạn điều chỉnh tốc độ làm việc trong một phạm vi rộng. Rôto pha là một cuộn dây ba pha, được kết nối theo sơ đồ "sao" hoặc tam giác. Trong các động cơ điện như vậy, có những bàn chải đặc biệt trong thiết kế, bạn có thể điều chỉnh tốc độ của rôto. Nếu một bộ lưu biến đặc biệt được thêm vào cơ cấu của động cơ như vậy, thì khi động cơ khởi động, điện trở hoạt động sẽ giảm và do đó dòng khởi động sẽ giảm, gây ảnh hưởng xấu đến mạng điện và bản thân thiết bị.
Nguyên tắc hoạt động
Khi cho dòng điện vào các cuộn dây của stato thì xuất hiện từ thông. Vì các pha được dịch chuyển tương đối với nhau 120 độ, do đó, dòng trong các cuộn dây quay. Nếu rôto bị ngắn mạch, thì với sự quay như vậy, trong rôto sẽ xuất hiện dòng điện, tạo ra trường điện từ. Tương tác với nhau, từ trường của rôto và stato làm cho rôto của động cơ điện quay. Nếu rôto cùng pha thì điện áp đặt vào stato và rôto đồng thời, trong mỗi cơ cấu xuất hiện một từ trường, chúng tương tác với nhau và làm quay rôto.
Ưu điểm của động cơ không đồng bộ
| với rôto lồng sóc | Với rôto pha |
|---|---|
| 1. Thiết bị đơn giản và mạch khởi động | 1. Dòng khởi động nhỏ |
| 2. Chi phí sản xuất thấp | 2. Khả năng điều chỉnh tốc độ quay |
| 3. Với tải tăng dần, tốc độ trục không thay đổi | 3. Làm việc với quá tải nhỏ mà không thay đổi tốc độ |
| 4. Có khả năng chịu quá tải ngắn hạn | 4. Khởi động tự động có thể được áp dụng |
| 5. Đáng tin cậy và bền bỉ trong hoạt động | 5. Có một mô-men xoắn lớn |
| 6. Thích hợp cho mọi điều kiện làm việc | |
| 7. Có hiệu quả cao |
Nhược điểm của động cơ không đồng bộ
| với rôto lồng sóc | Với rôto pha |
|---|---|
| 1. Tốc độ rôto không thể điều chỉnh | 1. Kích thước lớn |
| 2. Mômen khởi động nhỏ | 2. Hiệu quả thấp hơn |
| 3. Dòng khởi động cao | 3. Bảo trì thường xuyên do bàn chải mài mòn |
| 4. Một số thiết kế phức tạp và sự hiện diện của các tiếp điểm di chuyển |
Động cơ không đồng bộ là thiết bị rất hiệu quả với các đặc tính cơ học tuyệt vời, khiến chúng dẫn đầu về tần suất sử dụng.
Chế độ hoạt động

Động cơ điện kiểu không đồng bộ là một cơ cấu vạn năng và có một số chế độ cho thời gian hoạt động:
- Tiếp diễn;
- thời gian ngắn;
- Định kỳ;
- Lặp lại-ngắn hạn;
- Đặc biệt.
Chế độ liên tục - chế độ hoạt động chính của thiết bị không đồng bộ, được đặc trưng bởi động cơ điện hoạt động liên tục mà không cần tắt máy với tải không đổi. Phương thức hoạt động này là phổ biến nhất, được sử dụng trong các xí nghiệp công nghiệp ở khắp mọi nơi.
Chế độ nhất thời - hoạt động cho đến khi đạt được tải không đổi trong một thời gian nhất định (10 đến 90 phút), không có thời gian để hâm nóng hết mức có thể. Sau đó nó sẽ tắt. Chế độ này được sử dụng khi cung cấp chất làm việc (nước, dầu, khí đốt) và các tình huống khác.
Chế độ định kỳ - khoảng thời gian làm việc có giá trị nhất định và được tắt khi kết thúc chu kỳ làm việc. Chế độ vận hành start-work-stop. Đồng thời, nó có thể tắt trong một thời gian mà nó không có thời gian để hạ nhiệt độ bên ngoài và bật lại.
Chế độ gián đoạn - Động cơ không tăng nhiệt tối đa, nhưng cũng không có thời gian để nguội xuống nhiệt độ bên ngoài. Nó được sử dụng trong thang máy, thang cuốn và các thiết bị khác.
chế độ đặc biệt - thời hạn và khoảng thời gian đưa vào là tùy ý.
Trong kỹ thuật điện, có một nguyên lý về sự thuận nghịch của máy điện - nghĩa là máy vừa có thể chuyển hóa năng lượng điện thành cơ năng vừa thực hiện các hành động ngược lại.
Động cơ điện không đồng bộ cũng ứng với nguyên lý này và có phương thức hoạt động của động cơ và máy phát.
Chế độ động cơ - chế độ hoạt động chính của động cơ điện không đồng bộ. Khi đặt điện áp vào các cuộn dây, một mômen điện từ phát sinh, kéo rôto theo trục và do đó trục bắt đầu quay, động cơ đạt tốc độ không đổi, làm công việc có ích.
chế độ máy phát điện - dựa trên nguyên lý kích thích dòng điện trong các cuộn dây của động cơ trong quá trình rôto quay. Nếu rôto của động cơ quay bằng cơ học, thì một suất điện động được hình thành trên các cuộn dây của stato, khi có tụ điện trong các cuộn dây thì xuất hiện dòng điện điện dung.Nếu điện dung của tụ điện là một giá trị nào đó thì tùy thuộc vào đặc tính của động cơ, khi đó máy phát điện sẽ tự kích thích và xuất hiện hệ thống điện áp ba pha. Như vậy, động cơ lồng sóc sẽ hoạt động như một máy phát điện.
Điều khiển tốc độ động cơ không đồng bộ
Để điều chỉnh tốc độ quay của động cơ điện không đồng bộ và điều khiển chế độ làm việc của chúng, có các phương pháp sau:
- Tần số - khi tần số của dòng điện trong mạng điện thay đổi thì tần số quay của động cơ điện cũng thay đổi. Đối với phương pháp này, một thiết bị được gọi là bộ biến tần được sử dụng;
- Rheostatic - khi điện trở của bộ biến đổi dòng chảy trong rôto thay đổi, tốc độ quay thay đổi. Phương pháp này làm tăng mômen khởi động và độ trượt tới hạn;
- Xung - một phương pháp điều khiển trong đó một loại điện áp đặc biệt được áp dụng cho động cơ.
- Chuyển đổi các cuộn dây trong quá trình vận hành của động cơ điện từ mạch “sao” sang mạch “tam giác”, điều này làm giảm dòng khởi động;
- Điều khiển thay đổi cặp cực cho rôto lồng sóc;
- Kết nối của điện kháng cảm ứng cho động cơ với rôto dây quấn.
Với sự phát triển của hệ thống điện tử, việc điều khiển các loại động cơ điện không đồng bộ ngày càng trở nên hiệu quả và chính xác hơn. Những động cơ như vậy được sử dụng ở khắp mọi nơi trên thế giới, sự đa dạng của các nhiệm vụ được thực hiện bởi các cơ chế như vậy đang tăng lên mỗi ngày và nhu cầu về chúng không hề giảm.
Các bài tương tự: