Cảm biến theo nghĩa chung là một thiết bị có chức năng chuyển đổi một đại lượng vật lý này thành một đại lượng vật lý khác, thuận tiện cho quá trình xử lý, truyền tải hoặc chuyển đổi sau đó. Theo quy luật, đại lượng đầu tiên là vật lý, không thể đo trực tiếp (nhiệt độ, tốc độ, độ dịch chuyển, v.v.), và đại lượng thứ hai là tín hiệu điện hoặc quang học. Một ngách trong lĩnh vực dụng cụ đo lường được sử dụng bởi các cảm biến, phần tử chính của nó là một cuộn cảm.
Nội dung
Cảm biến điện cảm hoạt động như thế nào và hoạt động như thế nào
Theo nguyên lý hoạt động, cảm ứng hoạt động, tức là chúng cần một máy phát điện bên ngoài để hoạt động. Nó cung cấp một tín hiệu với tần số và biên độ nhất định cho cuộn cảm.
Dòng điện đi qua các vòng của cuộn dây tạo ra từ trường. Nếu một vật dẫn điện đi vào từ trường, các thông số của cuộn dây thay đổi.Nó vẫn chỉ để sửa chữa thay đổi này.
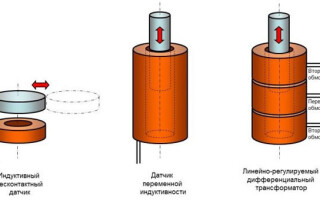
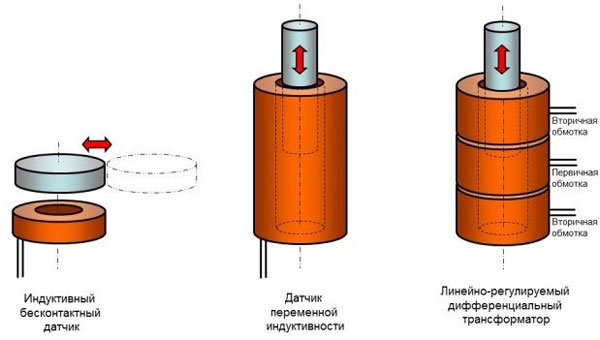
Cảm biến không tiếp xúc đơn giản phản ứng với sự xuất hiện của các vật thể kim loại trong vùng gần của cuộn dây. Điều này làm thay đổi trở kháng của cuộn dây, sự thay đổi này phải được chuyển đổi thành tín hiệu điện, khuếch đại và (hoặc) cố định việc vượt qua ngưỡng bằng cách sử dụng một mạch so sánh.
Các cảm biến thuộc loại khác phản ứng với những thay đổi về vị trí dọc của đối tượng đóng vai trò là lõi của cuộn dây. Khi vị trí của vật thay đổi, nó chuyển động ra hoặc vào cuộn dây, do đó độ tự cảm của nó thay đổi. Sự thay đổi này có thể được chuyển đổi thành tín hiệu điện và được đo. Một phiên bản khác của cảm biến như vậy là khi một vật thể tiếp cận cuộn dây từ bên ngoài. Điều này làm cho độ tự cảm giảm do hiệu ứng mặt đất.
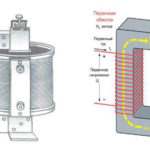
Một phiên bản khác của cảm biến dịch chuyển quy nạp là một máy biến áp vi sai có thể điều chỉnh tuyến tính (LVDT). Nó là một cuộn dây hỗn hợp, được làm theo thứ tự sau:
- cuộn thứ cấp 1;
- cuộn sơ cấp;
- cuộn thứ cấp 2.
Tín hiệu từ máy phát được đưa vào cuộn sơ cấp. Từ trường được tạo ra bởi cuộn dây giữa gây ra EMF trong mỗi cuộn dây thứ cấp (nguyên lý máy biến áp). Khi nó chuyển động, lõi sẽ làm thay đổi mối liên hệ lẫn nhau giữa các cuộn dây, làm thay đổi suất điện động trong mỗi cuộn dây. Sự thay đổi này có thể được khắc phục bằng mạch đo. Vì chiều dài của lõi nhỏ hơn tổng chiều dài của cuộn dây hỗn hợp, nên vị trí của đối tượng có thể được xác định rõ ràng bằng tỷ số EMF trong cuộn thứ cấp.
Trên nguyên tắc tương tự - một sự thay đổi trong khớp nối cảm ứng giữa các cuộn dây - một cảm biến rẽ được chế tạo.Nó bao gồm hai cuộn dây đồng trục. Tín hiệu được áp dụng cho một trong các cuộn dây, EMF trong cuộn dây thứ hai phụ thuộc vào góc quay lẫn nhau.
Từ nguyên lý hoạt động, hiển nhiên cảm biến cảm ứng dù có thiết kế như thế nào đi chăng nữa thì đều là loại không tiếp xúc. Chúng hoạt động ở khoảng cách xa, và không cần tiếp xúc trực tiếp với đối tượng được điều khiển.
Ưu điểm và nhược điểm của cảm biến cảm ứng
Ưu điểm của cảm biến kiểu cảm ứng chủ yếu bao gồm:
- độ tin cậy của thiết kế;
- thiếu kết nối liên lạc;
- công suất đầu ra cao, làm giảm ảnh hưởng của tiếng ồn và đơn giản hóa mạch điều khiển;
- độ nhạy cao;
- khả năng sinh công của các nguồn có hiệu điện thế xoay chiều tần số công nghiệp.
Nhược điểm chính của cảm biến kiểu cảm ứng là kích thước, trọng lượng và độ phức tạp trong sản xuất của chúng. Đối với cuộn dây quấn có các thông số đã cho, cần phải có thiết bị đặc biệt. Ngoài ra, nhu cầu duy trì chính xác biên độ của tín hiệu từ bộ dao động chính được coi là một điểm trừ. Khi nó thay đổi, vùng nhạy cảm cũng thay đổi. Vì các cảm biến chỉ hoạt động trên dòng điện xoay chiều nên việc duy trì biên độ sẽ trở thành một vấn đề kỹ thuật nhất định. Trực tiếp (hoặc thông qua biến áp hạ bậc) sẽ không thể kết nối cảm biến với mạng gia đình hoặc mạng công nghiệp - trong đó, dao động điện áp về biên độ hoặc tần số thậm chí có thể đạt 10% ở chế độ bình thường, khiến độ chính xác của phép đo không thể chấp nhận được. .
Ngoài ra, độ chính xác của phép đo có thể bị ảnh hưởng bởi:
- từ trường của bên thứ ba (không thể che chắn cảm biến dựa trên nguyên tắc hoạt động của nó);
- bên thứ ba nhận EMF trong việc cung cấp và đo lường cáp;
- lỗi sản xuất;
- lỗi đặc tính cảm biến;
- phản chiếu hoặc biến dạng tại vị trí lắp đặt cảm biến không ảnh hưởng đến hiệu suất tổng thể;
- sự phụ thuộc của độ chính xác vào nhiệt độ (các thông số của dây quấn thay đổi, bao gồm cả điện trở của nó).
Việc cảm biến điện cảm không có khả năng phản ứng với sự xuất hiện của các vật thể điện môi trong từ trường của chúng có thể là do cả ưu điểm và nhược điểm. Một mặt, điều này giới hạn phạm vi ứng dụng của họ. Mặt khác, nó làm cho nó không nhạy cảm với sự hiện diện của bụi bẩn, dầu mỡ, cát, vv trên các đối tượng giám sát.
Kiến thức về những thiếu sót và hạn chế có thể có trong hoạt động của cảm biến điện cảm cho phép sử dụng hợp lý các ưu điểm của chúng.
Phạm vi của cảm biến cảm ứng
Cảm biến tiệm cận cảm ứng thường được sử dụng làm công tắc hành trình. Các thiết bị như vậy đã trở nên phổ biến:
- trong hệ thống an ninh, làm cảm biến để mở trái phép cửa sổ và cửa ra vào;
- trong hệ thống điện từ xa, như cảm biến về vị trí cuối cùng của các đơn vị và cơ chế;
- trong cuộc sống hàng ngày trong các đề án chỉ ra vị trí đóng của cửa ra vào, cửa chớp;
- để đếm các đối tượng (ví dụ, di chuyển dọc theo băng chuyền);
- để xác định tốc độ quay của các bánh răng (mỗi răng, đi qua cảm biến, tạo ra một xung động);
- trong các tình huống khác.

Bộ mã hóa góc có thể được sử dụng để xác định góc quay của trục, bánh răng và các thành phần quay khác, cũng như bộ mã hóa tuyệt đối. Ngoài ra, các thiết bị như vậy có thể được sử dụng trong máy công cụ và thiết bị robot cùng với cảm biến vị trí tuyến tính. Nơi bạn cần biết chính xác vị trí của các nút của các cơ chế.
Các ví dụ thực tế về việc triển khai các cảm biến cảm ứng
Trong thực tế, các thiết kế của cảm biến cảm ứng có thể được thực hiện theo nhiều cách khác nhau. Việc thực hiện và đưa vào đơn giản nhất là đối với cảm biến đơn hai dây, theo dõi sự hiện diện của các vật thể kim loại trong vùng nhạy cảm của nó. Các thiết bị như vậy thường được chế tạo trên cơ sở lõi hình chữ E, nhưng đây không phải là điểm cơ bản. Việc thực hiện như vậy dễ sản xuất hơn.
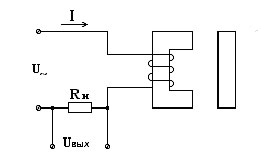
Khi điện trở của cuộn dây thay đổi thì cường độ dòng điện trong mạch và hiệu điện thế trên tải thay đổi. Những thay đổi này có thể được cam kết. Vấn đề là khả năng chịu tải trở nên quan trọng. Nếu nó quá lớn, thì sự thay đổi của dòng điện khi một vật kim loại xuất hiện sẽ tương đối nhỏ. Điều này làm giảm độ nhạy và khả năng chống ồn của hệ thống. Nếu nó nhỏ thì dòng điện trong mạch sẽ lớn, cần phải có thêm cảm biến điện trở.
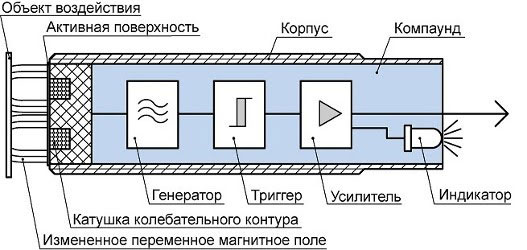
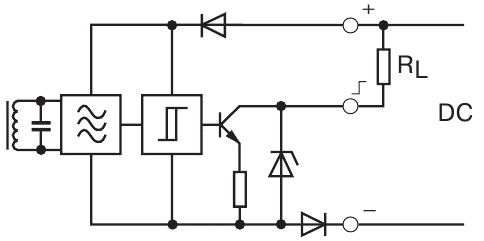
Do đó, có những thiết kế trong đó mạch đo lường được tích hợp sẵn trong vỏ cảm biến. Máy phát điện tạo ra các xung cấp cho cuộn cảm. Khi đạt đến một cấp độ nhất định, bộ kích hoạt sẽ kích hoạt, chuyển từ trạng thái 0 sang trạng thái 1 hoặc ngược lại. Bộ khuếch đại đệm khuếch đại tín hiệu về công suất và (hoặc) điện áp, chiếu sáng (tắt) đèn LED và xuất tín hiệu rời rạc ra mạch bên ngoài.
Tín hiệu đầu ra có thể được hình thành:
- bằng điện từ hoặc rơ le trạng thái rắn - không hoặc một mức điện áp;
- "tiếp xúc khô" rơ le điện từ;
- mở bộ sưu tập bóng bán dẫn (cấu trúc n-p-n hoặc p-n-p).
Trong trường hợp này, cần có ba dây để kết nối cảm biến:
- món ăn;
- dây chung (0 vôn);
- dây tín hiệu.
Các cảm biến như vậy cũng có thể được cấp nguồn bằng điện áp DC. Xung điện cảm chúng được tạo thành nhờ một máy phát điện bên trong.
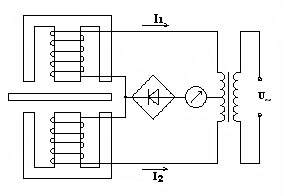
Bộ mã hóa vi sai được sử dụng để giám sát vị trí. Nếu đối tượng được điều khiển đối xứng với cả hai cuộn dây thì dòng điện qua chúng là như nhau. Khi bất kỳ cuộn dây nào được dịch chuyển về phía trường, sự mất cân bằng xảy ra, tổng dòng điện không còn bằng không, có thể được ghi lại bằng một chỉ báo có mũi tên ở giữa thang đo. Chỉ báo có thể được sử dụng để xác định cả độ lớn của sự dịch chuyển và hướng của nó. Thay vì thiết bị con trỏ, bạn có thể sử dụng sơ đồ điều khiển, khi nhận được thông tin về sự thay đổi vị trí, nó sẽ phát tín hiệu, thực hiện các biện pháp căn chỉnh đối tượng, điều chỉnh quy trình công nghệ, v.v.

Cảm biến chế tạo theo nguyên lý của máy biến áp vi sai điều chỉnh tuyến tính được sản xuất dưới dạng kết cấu hoàn chỉnh là một khung có các cuộn sơ cấp và cuộn thứ cấp và một thanh chuyển động bên trong (có thể là lò xo). Các dây được đưa ra ngoài để gửi tín hiệu từ máy phát và tháo EMF khỏi các cuộn thứ cấp. Một đối tượng được điều khiển có thể được gắn một cách cơ học vào thanh. Nó cũng có thể được làm bằng chất điện môi - chỉ vị trí của thân mới quan trọng để đo.
Bất chấp những thiếu sót cố hữu nhất định, cảm biến quy nạp đóng nhiều khu vực liên quan đến việc phát hiện không tiếp xúc các đối tượng trong không gian.Bất chấp sự phát triển không ngừng của công nghệ, loại thiết bị này sẽ không rời khỏi thị trường thiết bị đo lường trong tương lai gần, vì hoạt động của nó dựa trên các định luật vật lý cơ bản.
Các bài tương tự: